With just a few Ansible scripts, we were capable of deploying the necessary infrastructure, regardless of the number of devices in it. The team really loved this method and, as a result, we highly recommend it.
Performance
Traditionally, Akka is used to build distributed server solutions. So, we faced a question - if Akka-based products are effective enough on devices with limited computing capabilities. We received the answer through an experiment. In our case, we used the Raspberry Pi 2 Model B as the drone’s onboard computer. The device had the following characteristics:
- A 900MHz quad-core ARM Cortex-A7 CPU
- 1GB RAM
The characteristics might look quite impressive, but alongside our process, this mini computer also has to run two important processes with nearly real-time priorities. To prevent our software from inhibiting the neighbouring processes, we limited the CPU usage for it to a single core. Additionally, we set one more limitation: the use of memory by the Java process was restricted by the -Xmx32m parameter.
Before the test flight, the team decided to check how our Embedded Node would work on Raspberry Pi with such limitations. Once launched, the process immediately utilised 25% CPU (100% according to top data), or just one core out of four, and in a couple of seconds the CPU use dropped down to an acceptable 10-15%. The memory showed even better results: the process did not utilize all of the allocated 32 Mb, and the garbage collector was starting after a time-out.
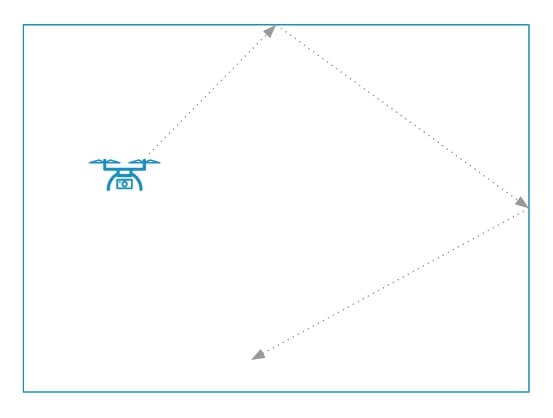
During the flight, the performance parameters declined. CPU use reached 20% and the garbage collector worked intensely, because the autopilot generated a lot of telemetry data. If necessary, there is some possibility for optimization by limiting the telemetry stream only to autopilot configuration. We did not introduce such limitations because the parameters were within the normal range and the software did its job well - the control station directed the drone and kept it within the designated perimeter.
The project also revealed a number of challenges we still have to overcome. In particular, the higher the drone’s speed, the harder it is to control it. This is a complex problem and our framework cannot take all the blame for it. The control scheme that we used in the experiment is hardly suitable for real tasks. We can feed the drone the destination coordinates instead of the velocity vectors. Such an approach will add accuracy to the drone positioning, offsetting the dependance on the data link between the drone and the control station.
The second problem is the insufficient speed of our software. Akka is very slow to start. If the actor system is launched, joining the cluster takes from 5 to 20 seconds. Primarily, the speed depends on the quality of the network connection. We still work to improve this aspect.
Emulation
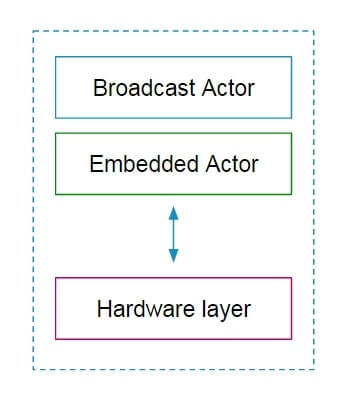
Another interesting feature of Pragmukko is the possibility to emulate hardware cluster members. This can come in handy while testing the business logic that is implemented on the devices. To enable hardware emulation, we extended the framework with the possibility of switching the Hardware Interaction Layer to Mock. For the tests, we saved real telemetry in a file and then ran its instances on the Embedded Node. I can already see how we will run integration tests for our drones on Jenkins. Then, the expression “the tests have crashed” will not be nearly as dramatic as it is now. Follow the link to learn more about Pragmukko, its features and the project roadmap.
Conclusions
Pragmukko makes the system easy to program, configure and test. In spite of certain complications, we are satisfied with the result. We also believe that our framework has the potential for widespread use. If you have any thoughts on the topic or IoT-related questions you would like to discuss with our experts, please get in touch with us.
No drone was harmed in the making of this experiment.